Archivseite
Technische Daten
- C-Control Mikroprozessor (8 bit Motorola, 4 MHz, Stromsparmodus, ca. 8 kb Speicher für Programme, 24 Bytes für Variablen)
- Co-Prozessor
- Programmierung per CCBasic
- Ausgabemöglichkeiten: Beeper, 4 rote LED
- Sensoren: IR (Kommunikation, Antikollision), Berührungssensor, Lichtsensoren, Schallsensor
- Datentransfer per RS323
- Stromversorgung: 6 AA-Batterien (Galvanische Zellen) oder 6 AA-Akkumulatoren, externes Netzteil
- Laufzeit (Batterien oder Akkumulatoren) ca. 1,5 h bei Volllast
- Raupenantrieb gesteuert von zwei getrennt steuerbaren Motoren (PLM-Ansteuerung mit 256 Fahrstufen)
- Maße (B x H x L): 128 mm, 50 mm, 172 mm; 10 mm Bodenfreiheit
- Programmiersoftware für DOS oder Windows (min. Version 9x) (es wird kein Superrechner benötigt, ein 486er mit RS232-Schnittstelle reicht völlig
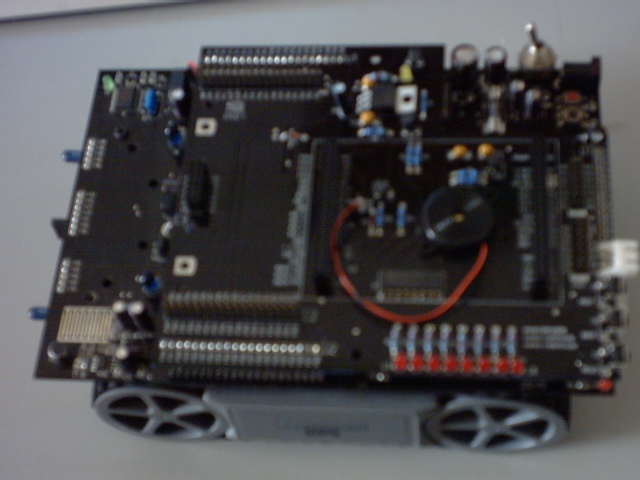
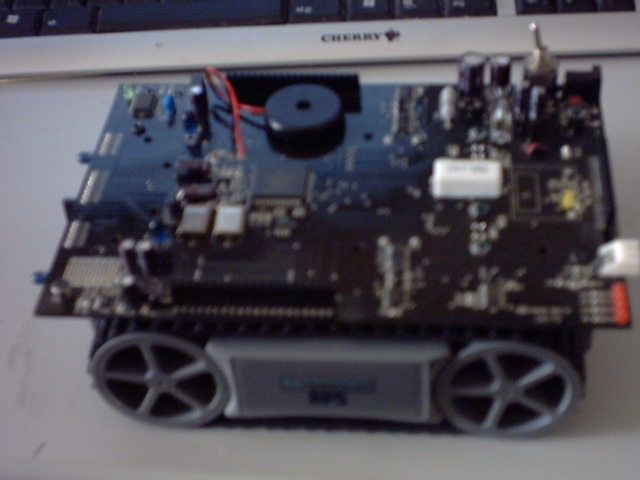
Zusätzlich wurde der Robby mit einer Erweiterungsplatine erweitert, um bequem ein LC-Display anzuschließen und mehr Möglichkeiten zu Erweiterung zu haben. Später soll noch eine C-Control II (Vorteil: 16 bit CPU, mehr Speicher, Programmierung in C und Assembler möglich, einfachere Ansteuerungsmöglichkeiten; Nachteil: teuer) und DCF-77-Funkuhrmodul hinzukommen.
Downloads
Aktuell läuft nur ein Programm auf dem Roboter. Dies ist ein simples Weckprogramm. Um eine bestimmte Uhrzeit fährt der Roboter einige Meter und fängt an mächtig loszupiepen. Aufgrund fehlenden Funkmodul muss vorher die Uhrzeit über eine serielles Verbindung gestellt werden. Weckzeit und Dauer der Piepwelle wird ebenfalls über die Verbindung eingestellt. Anvisiert wird die Zeitstellung per Funkuhrmodul und Einstellung per IR über meinen Palmpda oder normale Fernbedienung.
Quellcode Wecker ohne Erweiterungsplatine (6,2 KB, BASIC-File)
Quellcode Wecker mit Erweiterungsplatine (7,2 KB, BASIC-File)
Bilder (ohne Erweiterungsplatine)